publications
2026


2025
- arXiv
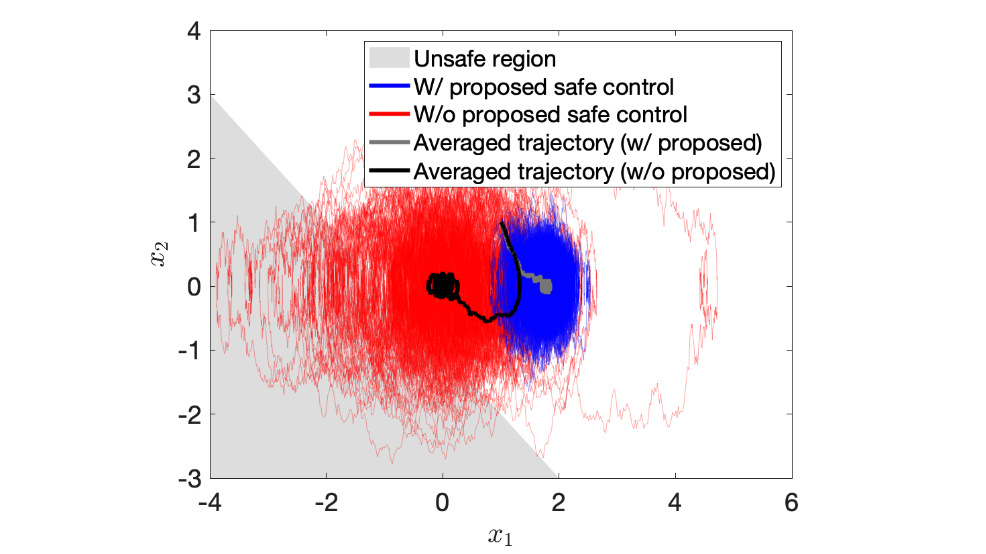
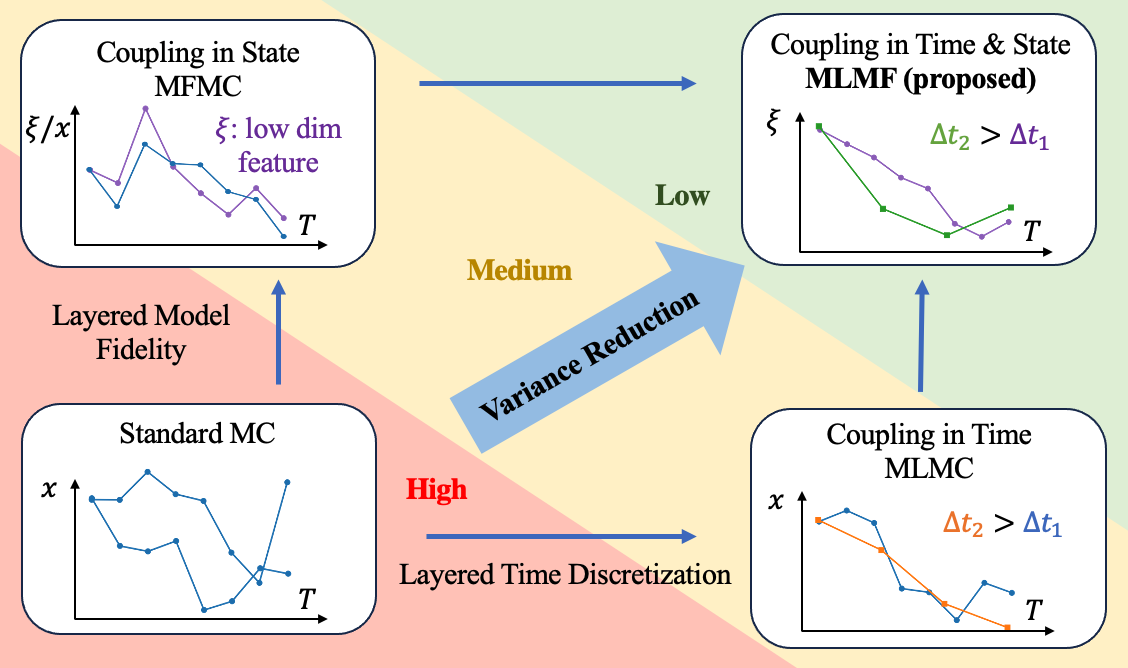 Multi-Level Multi-Fidelity Methods for Path Integral and Safe ControlarXiv preprint arXiv:2510.07756, 2025
Multi-Level Multi-Fidelity Methods for Path Integral and Safe ControlarXiv preprint arXiv:2510.07756, 2025 - arXiv





2024



2023
- L-CSS
 Scalable Long-Term Safety Certificate for Large-Scale SystemsIEEE Control Systems Letters, 2023
Scalable Long-Term Safety Certificate for Large-Scale SystemsIEEE Control Systems Letters, 2023 - IFAC 2023
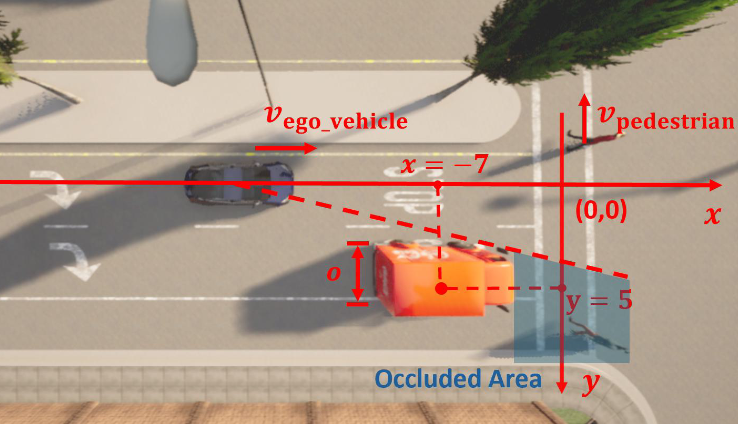
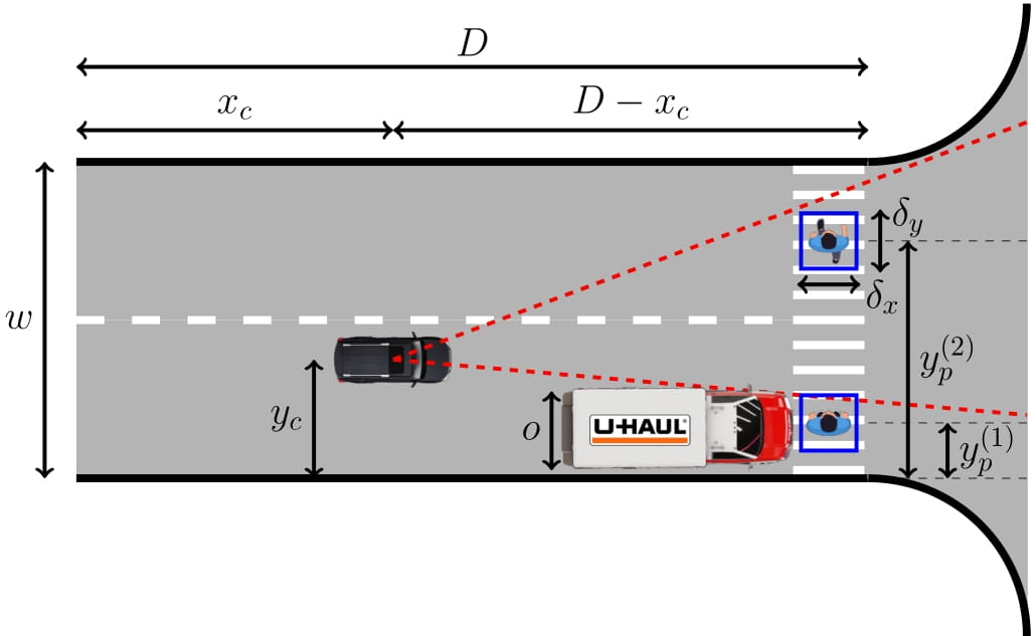 An Occlusion-and Interaction-Aware Safe Control Strategy for Autonomous VehiclesIFAC-PapersOnLine, 2023
An Occlusion-and Interaction-Aware Safe Control Strategy for Autonomous VehiclesIFAC-PapersOnLine, 2023


2022
- IV 2022
 Adaptive Safe Control for Driving in Uncertain Environments2022 IEEE Intelligent Vehicles Symposium (IV) , 2022
Adaptive Safe Control for Driving in Uncertain Environments2022 IEEE Intelligent Vehicles Symposium (IV) , 2022

2020
- TPAMI
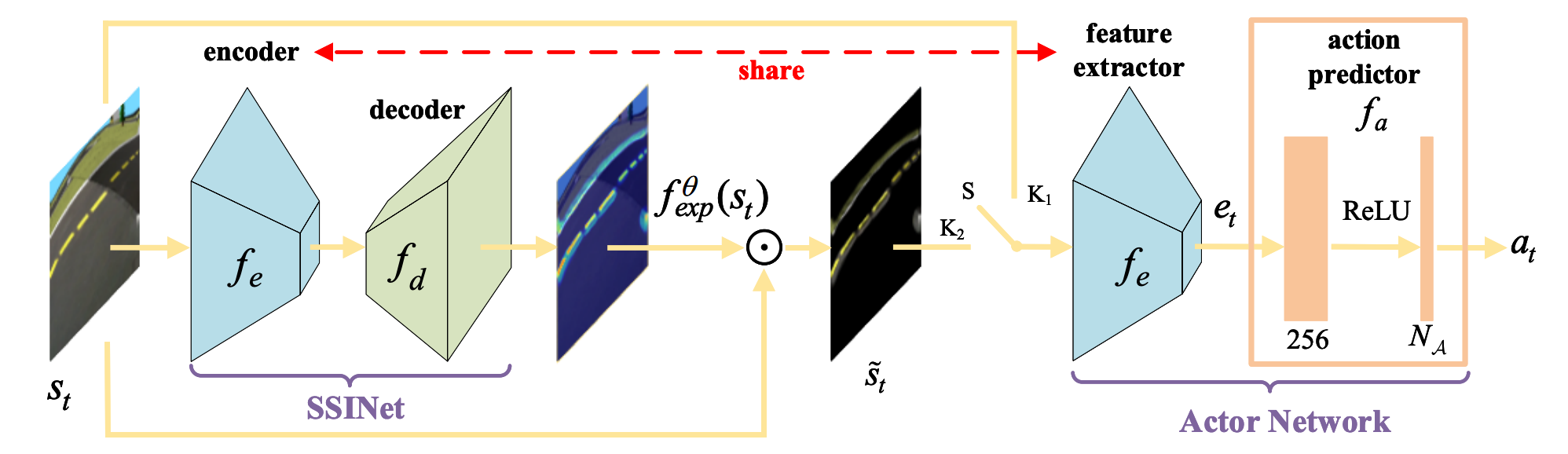 Self-Supervised Discovering of Interpretable Features for Reinforcement LearningIEEE Transactions on Pattern Analysis and Machine Intelligence, 2020
Self-Supervised Discovering of Interpretable Features for Reinforcement LearningIEEE Transactions on Pattern Analysis and Machine Intelligence, 2020
