Zhuoyuan Jacob Wang

Hi, I’m a final year PhD in Electrical and Computer Engineering at Carnegie Mellon University, advised by Prof. Yorie Nakahira. Prior to joining CMU, I obtained my Bachelor degree at Tsinghua University, advised by Prof. Gao Huang and Prof. Yilin Mo.
My research interests include safety-critical control, physics-informed learning, stochastic systems and robotics.
Contact: zhuoyuaw [at] andrew.cmu.edu
Follow: Google Scholar | LinkedIn | jacobwang925
I'm on the 2025 – 2026 job market!
My research agenda is centered on theoretically grounded safe and efficient control systems via integration of physics and learning. My research philosophy is to leverage physics model structure to enable learning-based control methods with high efficiency and theoretical guarantees. The key thrusts of my research include:
-
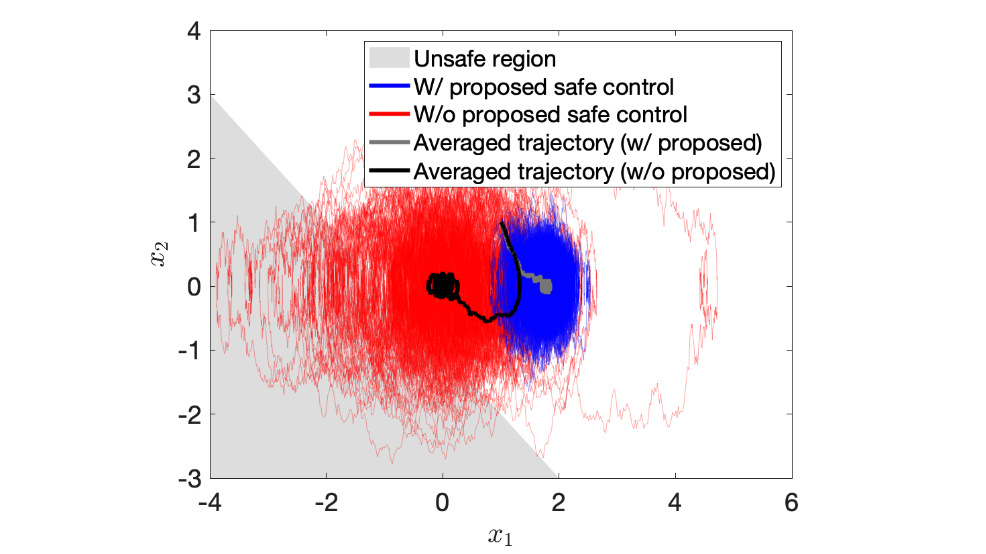
Myopically verifiable long-term safe control under uncertainty: proposing ‘forward-invariance’ on probability space, and designing one-step verifiable real-time online control strategies to guarantee long-term safety, despite unbounded noise, unknown system dynamics and latent risk from human interaction / occlusions. (ACC 22, IV 22, IFAC 23, ICRA 24, TAC 26)
-
Physics-informed optimal and safe control: deriving mathematical structure to connect risk probabilities and value functions in stochastic systems with partial differential equations (PDEs), and designing physics-informed learning framework for efficient estimation. (L4DC 23, AAAI 24, TAC 25)
-
Scalable and generalizable learning for control: developing dimensionality reduction techniques, efficient representation structures, and neural operator learning mechanisms for learning system designs that are scalable to high dimensions and are generalizable to varying system instances. (L-CSS 23, AAAI 24, CDC 25)
news
| Apr 23, 2026 | PI-BSNet and OpInf-LLM will be presented as posters at the ICLR 2026 AI + PDE Workshop! |
|---|---|
| Feb 20, 2026 | Our paper “Physics-Informed Deep B-Spline Networks” was accepted to Transactions on Machine Learning Research (TMLR)! |
| Jan 22, 2026 | Our paper “Online Adaptive Probabilistic Safety Certificate with Language Guidance” was accepted to L4DC 2026! |
| Dec 23, 2025 | Our paper “Myopically Verifiable Probabilistic Certificates for Safe Control and Learning” was accepted to IEEE Transactions on Automatic Control (TAC)! |
| Nov 22, 2025 | I will be attending NeurIPS 2025 in San Diego from December 3–6. Happy to chat! |
selected publications
- L-CSS
 Scalable Long-Term Safety Certificate for Large-Scale SystemsIEEE Control Systems Letters, 2023
Scalable Long-Term Safety Certificate for Large-Scale SystemsIEEE Control Systems Letters, 2023 - TPAMI
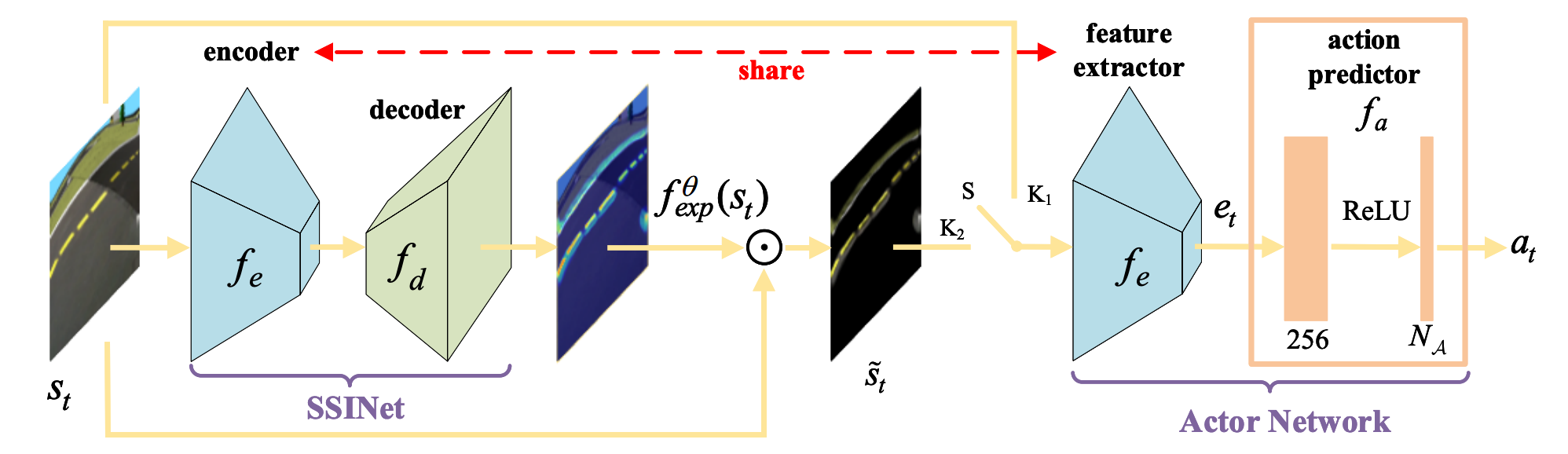 Self-Supervised Discovering of Interpretable Features for Reinforcement LearningIEEE Transactions on Pattern Analysis and Machine Intelligence, 2020
Self-Supervised Discovering of Interpretable Features for Reinforcement LearningIEEE Transactions on Pattern Analysis and Machine Intelligence, 2020






